Limitation du déplacement après l'étalonnage :
Vous devez limiter les déplacements de l’effecteur pour éviter qu'il s’écrase sur une tour ou sur la table.Pour cela, il suffit de changer des valeurs en fonction de votre machine et de rajouter le nom d'une variable. Ces positions correspondent au volume de travail et non aux positions des chariots sur les tours. Par défaut, les réglages sont ceux d'une imprimante cartésienne.
Rendez-vous lignes 326/332 :
326 // Travel limits after homing
327 #define X_MAX_POS 205
328 #define X_MIN_POS 0
329 #define Y_MAX_POS 205
330 #define Y_MIN_POS 0
331 #define Z_MAX_POS 200
332 #define Z_MIN_POS 0
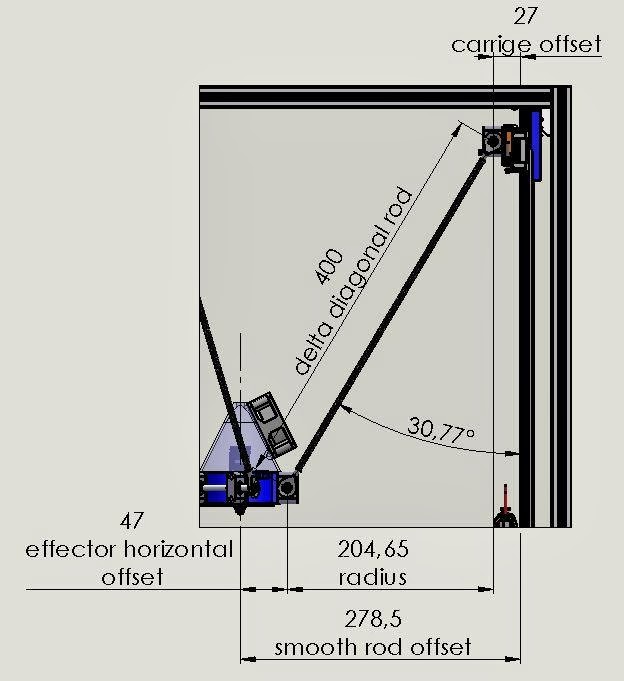
Contrairement à une machine cartésienne qui a une surface de travail rectangulaire, la surface de travail d'une delta est circulaire et le point de référence dans l'espace de travail se situe au centre du plateau.
Vous allez donc répartir le rayon de votre surface d'impression. Pour ma machine, mon volume imprimable a un diamètre de 180 mm (-90 minimum et 90 maximum) et une hauteur de 210 mm.
Pour la hauteur, le minimum reste 0, mais le maximum sera défini par une nouvelle variable qui s’appelle : MANUAL_Z_HOME_POS. Rajoutez la, à la ligne 331, comme ceci :
326 // Travel limits after homing
327 #define X_MAX_POS 90
328 #define X_MIN_POS -90
329 #define Y_MAX_POS 90
330 #define Y_MIN_POS -90
331 #define Z_MAX_POS MANUAL_Z_HOME_POS
332 #define Z_MIN_POS 0
Mais pour pouvoir utiliser "MANUAL_Z_HOME_POS", il vous faut d'abord dé-commenter cette ligne :
339 //#define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used
Comme ceci :
339 #define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used
Et rendez-vous lignes 342/347 où vous allez changer la valeur pour "Z" :
342 //Manual homing switch locations:
343 // For deltabots this means top and center of the cartesian print volume.
344 #define MANUAL_X_HOME_POS 0
345 #define MANUAL_Y_HOME_POS 0
346 #define MANUAL_Z_HOME_POS 0
347 //#define MANUAL_Z_HOME_POS 402 // For delta: Distance between nozzle and print surface after homing.
Changez la valeur à la ligne 346.
342 //Manual homing switch locations:
343 // For deltabots this means top and center of the cartesian print volume.
344 #define MANUAL_X_HOME_POS 0
345 #define MANUAL_Y_HOME_POS 0
346 #define MANUAL_Z_HOME_POS 210
347 //#define MANUAL_Z_HOME_POS 402 // For delta: Distance between nozzle and print surface after homing.
ENDSTOPS_ONLY_FOR_HOMING :
Attention, cela ne signifie pas que vous pourrez imprimer sur 210 mm de hauteur, car lorsque l'effecteur est auprès d'une tour (soit au bord de la zone imprimable), le chariot de cette tour sera beaucoup plus haut et dépassera la butée.
C'est pour cela que je trouve prudent de commenter la ligne 85 dans l'onglet "Configuration_adv.h" , section "Mechanical Settings", comme ceci :
85 //#define ENDSTOPS_ONLY_FOR_HOMING // If defined the endstops will only be used for homing
Cela permettra que les butées restent sensibles lors de l'impression.
Néanmoins, pensez que la hauteur de vos pièces imprimées ne devra pas excéder 180 mm de haut (dans mon cas).
Dans le prochain billet, nous définirons les "MOVEMENT SETTINGS".