Paramètres Delta
Nous allons activer la fonction Delta de Marlin.
Ouvrez l'onglet Configuration.h et rendez-vous à la section appelée "Delta Settings" (ligne 75) qui ressemble à ceci :

Rendre "Delta Setting" actif :
Allez à la ligne 78 et décommentez la, comme ceci :
77 // Enable DELTA kinematics 78 //#define DELTA
Félicitation, vous venez de rendre actif tous les réglages relatifs à une imprimante 3D de type Delta.77 // Enable DELTA kinematics 78 #define DELTA
Les paramètres de la Delta :
Nous allons maintenant régler les paramètres en fonction de notre machine. Les valeurs que je vais inscrire sont trouvées en fonction de ma machine. Vous devrez les définir en les mesurant vous même.
Pour commencer, voici un schéma qui présente la théorie des mesures dont on a besoin.
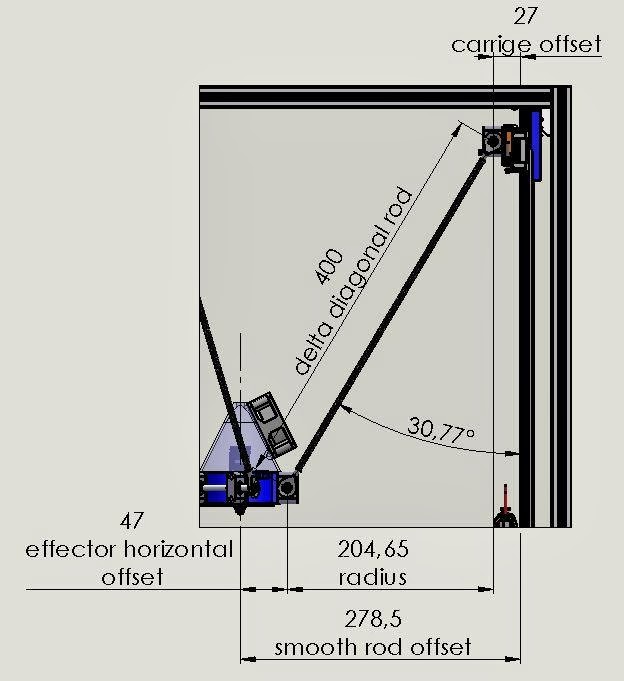
Source : 3D printer list
Prenons les dans l'ordre où elles apparaissent dans Arduino :

C'est la longueur théorique des bras qui relient les chariots à l'effecteur. La mesure se prend d'axe de rotation à axe de rotation, soit le centre des billes d'acier. Dans mon cas, c'est très facile de la mesurer grâce au montage que j'avais fait pour régler les bras.

A la ligne 86, changez par la valeur trouvée.
85 // Center-to-center distance of the holes in the diagonal push rods.
86 #define DELTA_DIAGONAL_ROD 250.0 // mm
DELTA _SMOOTH_ROD_OFFSET :
C'est la distance horizontale entre le centre de l'imprimante et l'axe d'une colonne.
Bon ! je suis d’accord, c'est un peu confus. le plus simple, c'est de voir cela sur une photo :

J'ai choisi arbitrairement le centre de la rainure comme repère, l'important est de garder la même référence pour la mesure du "delta_carriage_offset".
88 // Horizontal offset from middle of printer to smooth rod center.
89 #define DELTA_SMOOTH_ROD_OFFSET 183.5 // mm
DELTA_EFFECTOR_OFFSET :
C'est la distance entre le centre de l'effecteur et l'axe qui passe par le centre de deux rotules.

Ce n'est pas très évident à mesurer précisément. Je vous propose une méthode :
Premièrement, marquez chaque bille avec du crayon.

Ensuite, reportez par contact l'emplacement des billes sur une feuille de papier.

Enfin, reliez les points comme ci dessous, mesurez les trois cotés pour vérifier et faites une moyenne si elles ne sont pas identiques.
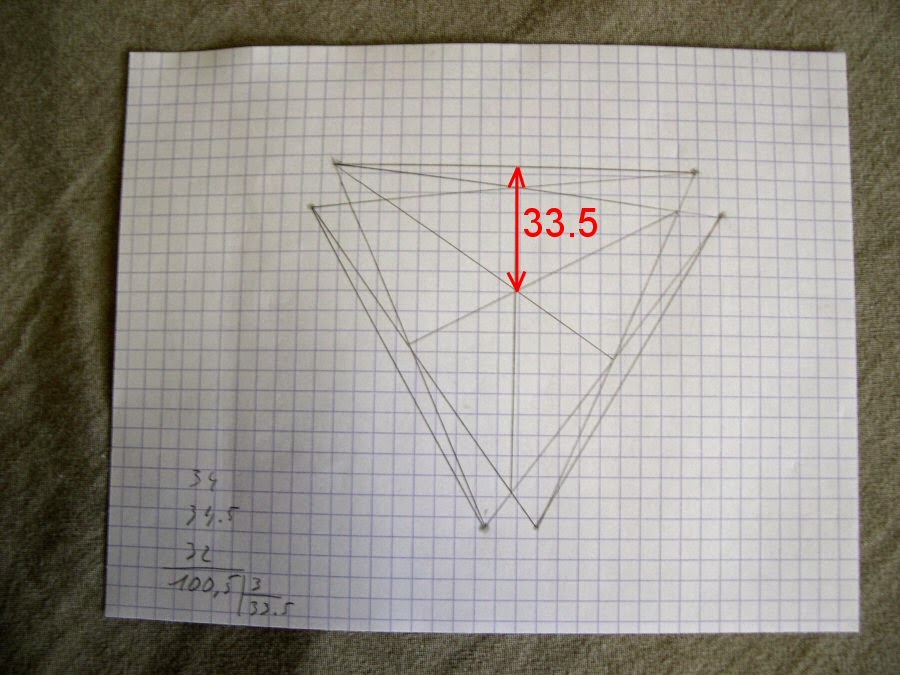
Notez la mesure à la ligne 92
91 // Horizontal offset of the universal joints on the end effector.
92 #define DELTA_EFFECTOR_OFFSET 33.5 // mm
DELTA_CARRIAGE_OFFSET :
C'est la mesure du décalage entre le centre d'une rotule avec l'axe d'une colonne (ici, le centre de la rainure).

Commencez par mesurer en vous calant sur le dessus de la bille puis soustrayez le rayon de la bille soit 6.15
ce qui donne : 31 - 6.15 = 24.85
94 // Horizontal offset of the universal joints on the carriages.
95 #define DELTA_CARRIAGE_OFFSET 24.85 // mm
DELTA_RADIUS :
97 // Effective horizontal distance bridged by diagonal push rods.
98 #define DELTA_RADIUS (DELTA_SMOOTH_ROD_OFFSET-DELTA_EFFECTOR_OFFSET-DELTA_CARRIAGE_OFFSET)
Là, il n'y a rien à changer le "delta_radius" sera calculé automatiquement à partir des trois valeurs précédentes.
Le prochain billet sera consacré à la calibration des butées.
Aucun commentaire:
Enregistrer un commentaire